思维导图
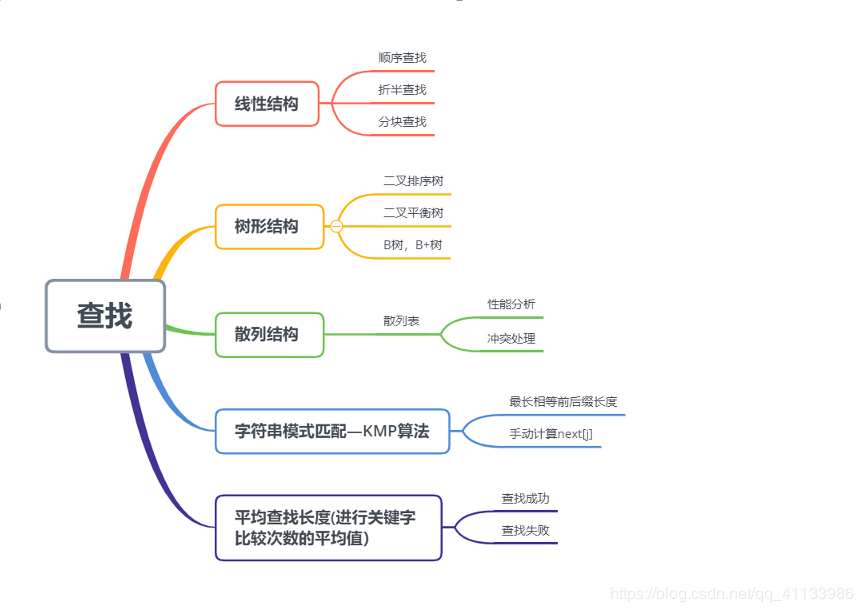
一、线性结构
1. 顺序查找(线性查找)O(n)
主要用于在线性表上进行查找
1 | int Search_Seq(int *a,int x){ |
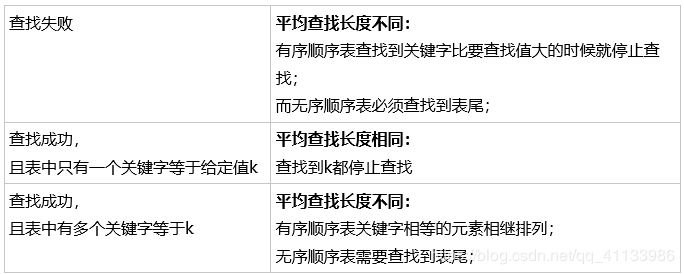
注:对于顺序查找,不管线性表是有序的还是无序的,成功查找第一个元素的比较次数为1,成功查找第二个元素的比较次数为2,依次类推,每个元素查找成功的比较次数只与其位置有关,与是否有序无关。
对有n个元素的有序顺序表和无序顺序表进行顺序查找,讨论平均查找长度
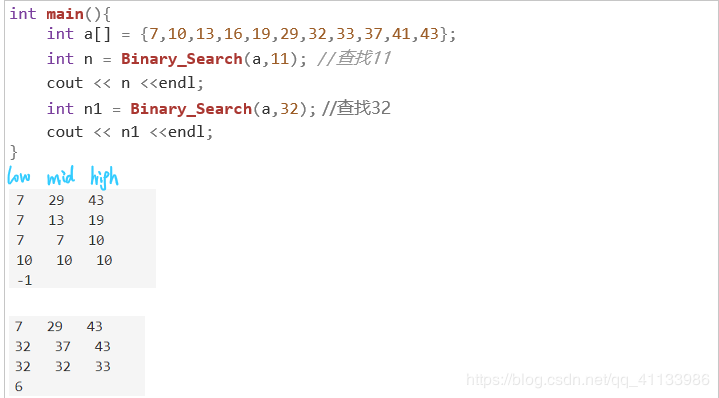
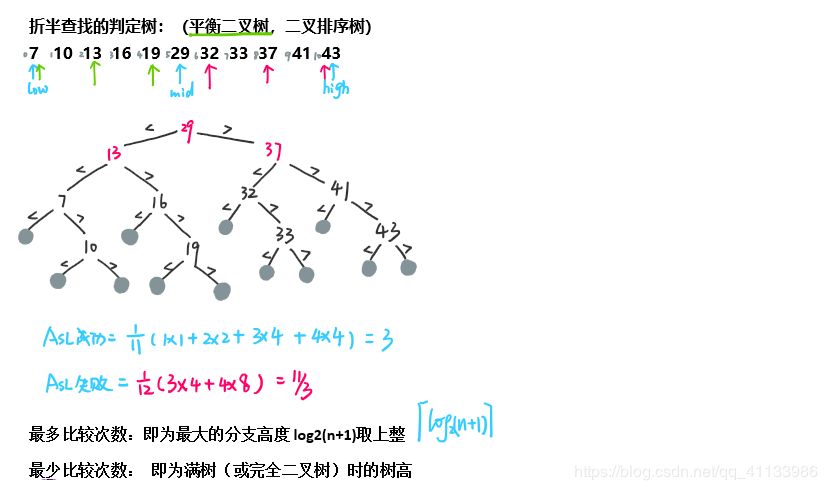
2. 折半查找(仅适用于有序的顺序表) O(log2n)
1 | int Binary_Search(int *a,int x){ |
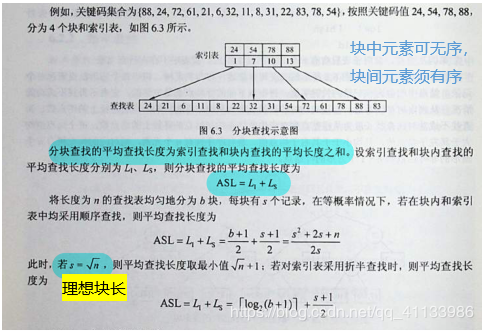
3. 分块查找(索引顺序查找)
块中元素可无序,块间元素须有序
二、树形结构
1. 二叉排序树
详见 第三章节 - 树
2. 平衡二叉树
详见 第三章节 - 树
3. B / B+ 树
B/B+树一种平衡的多路查找树,一般被用在文件系统(我们常说的B树其实是叫 B- 树)
| B 树 M阶 | B+ 树 M阶 |
|---|---|
| ① 关键字个数 + 1 = 子树个数 | ① 关键字个数 = 子树个数 |
| ② 根节点至少2棵子树(1个关键字),至多M棵子树(M-1个关键字) | ② 根节点至少2棵子树(2个关键字),至多M棵子树(M个关键字) |
| ③ 除根节点的分支结点至少 M/2 取上整 棵子树(至少 M/2 取上整 - 1 个关键字),至多 M 棵子树(至多 M - 1个关键字) | ③ 除根节点的分支结点至少 M/2 取上整 棵子树至少 M/2 取上整 -个关键字),至多 M 棵子树至多 M 个关键字) |
| ④ B 树的叶节点不带任何信息,所有的信息(key,value)都存在分支结点中 | ④ B+树叶子结点携带所有结点的全部信息(key,value),且按照大小顺序通过指针链接起来,分支结点仅携带索引信息(key)起索引作用。所以B+ 树的查找更稳定,因为每次都是从根节点到叶节点的查找路径 |
下图为 B+ 树

B树的插入删除操作
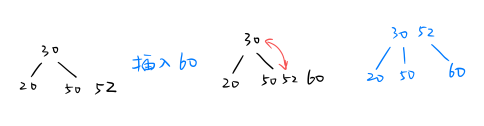
插入:
- 插入后该结点关键字个数小于等于m-1,直接插入
- 插入后该结点关键字个数大与m-1,以该结点的中间元素为轴进行结点分裂,并将该结点的中间元素上移到其父结点,相应的父结点要增加新分支,即分裂的结点
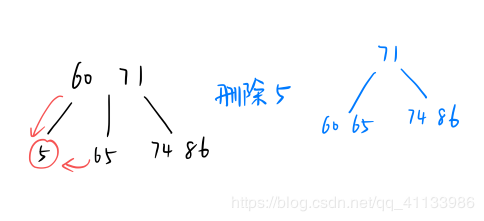
删除(叶节点):以3阶为例
- 删除该关键字后所在结点的关键字个数 > [m/2]取上整 - 1, 直接删除关键字
- 删除该关键字后所在结点的关键字个数 < [m/2]取上整 - 1 且与其相邻的左(右)兄弟结点够借 , 父子换位法(兄弟的第一个元素上移到父结点,父结点的最后一个元素下移到要删除的关键字所在的结点。—— 兄弟够借,父子换位
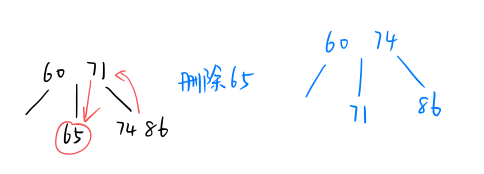
- 删除该关键字后所在结点的关键字个数 < [m/2]取上整 - 1 且与其相邻的左(右)兄弟结点不够借 , 则将关键字删除后,将父结点第一个元素下移至要删除元素所在结点处 并与其兄弟结点合并 —— 兄弟不够借,父子合并
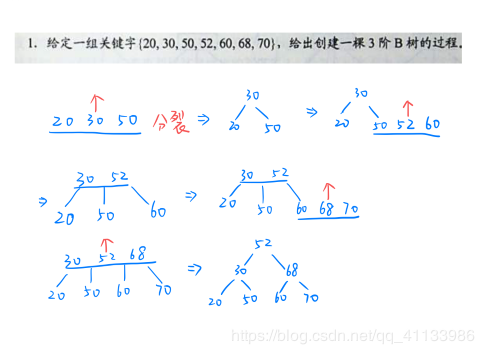
B树的建立过程举例:
4. 红黑树
① 为什么需要红黑树
对于二叉搜索树,如果插入的数据是随机的,那么它就是接近平衡的二叉树,平衡的二叉树,它的操作效率(查询,插入,删除)效率较高,时间复杂度是O(logN)。
但是可能会出现一种极端的情况,那就是插入的数据是有序的(递增或者递减),那么所有的节点都会在根节点的右侧或左侧,此时,二叉搜索树就变为了一个链表,它的操作效率就降低了,时间复杂度为O(N),所以可以认为二叉搜索树的时间复杂度介于O(logN)和O(N)之间,视情况而定。
那么为了应对这种极端情况,红黑树应运而生,它是具备了某些特性的二叉搜索树,能解决非平衡树问题,红黑树是一种接近平衡的二叉树。
② 红黑树的特征
首先,红黑树是一个二叉搜索 / 二叉排序树,它同时满足以下特性:
每个节点非黑即红
根节点是黑色
如果节点是红色的,那么它的子节点必须是黑色的(反之,不一定需要成立)
从根节点到叶节点或空子节点的每条路径,都包含相同数目的黑色结点

③ 红黑树的效率
红黑树的查找,插入和删除操作,时间复杂度都是O(logN)。
查找操作时,它和普通的相对平衡的二叉搜索树的效率相同,都是通过相同的方式来查找的,没有用到红黑树特有的特性。
但,如果插入的时候是有序数据,那么红黑树的查询效率就比二叉搜索树要高了,因为此时二叉搜索树不是平衡树,它的时间复杂度O(N)。
插入和删除操作时,由于红黑树的每次操作平均要旋转一次和变换颜色,所以它比普通的二叉搜索树效率要低一点,不过时间复杂度仍然是O(logN)。
总之,红黑树的优点就是对有序数据的查询操作不会慢到O(logN)的时间复杂度。
④ 红黑树的操作
👉 红黑树详解
三、散列结构
散列表
1. 散列表的定义
散列(哈希)表: 根据关键码值(Key value)而直接进行访问的数据结构 。根据给定的关键字通过散列函数来计算出关键字在表中的地址,以加快查找的速度。
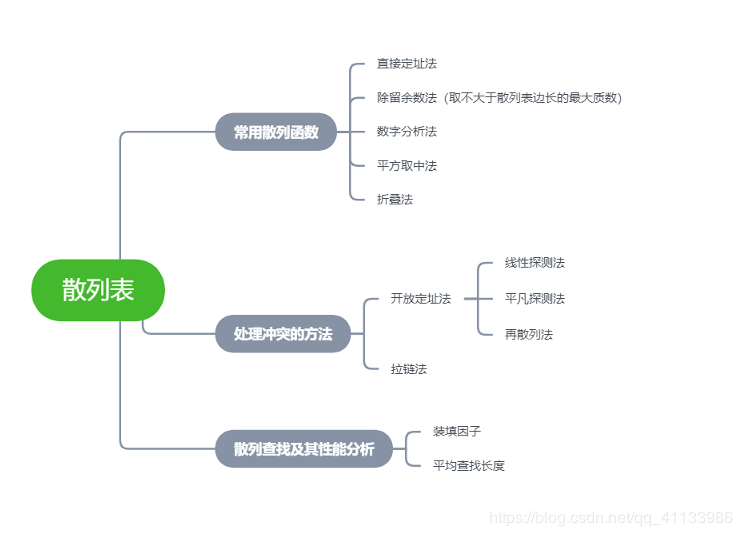
2. 散列函数的构造方法
- 直接定址法
H(key) = a*key + b - 除留取余法
H(key) = key%p(p为不大于m的最大质数)
3. 散列(哈希)冲突
冲突:指的是多个关键字映射同一个地址的情况。
4. 处理冲突的方法
1.开放定址法
线性探测法(常用,会产生堆积问题)
冲突发生时顺序查找下一个位置
平方探测法
再散列法
2.拉链法(所有的同义词都存储在一个线性链表中)
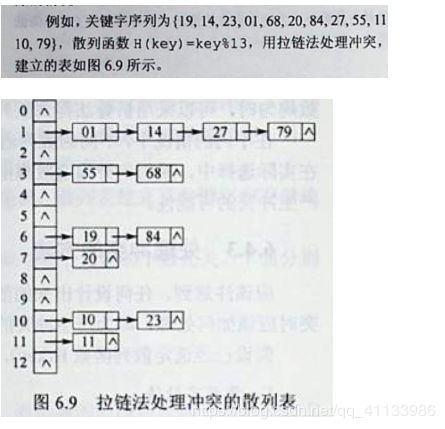
5. 性能分析
平均查找长度仅依赖于装填因子,越满发生冲突的可能性越大。
- ASL成功 (除以 元素的总个数)
- ASL失败 (除以 P 或 mod后面的数)
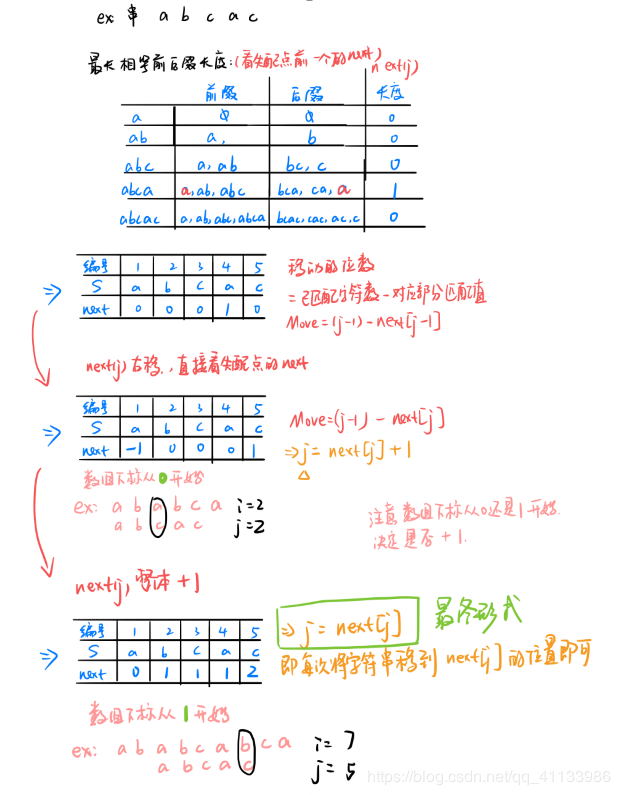
四、字符串模式匹配
KMP 算法
1 | int Index_KMP(string s,string T,int next[],int pos){ |
next 数组算法如下: